
Butterfly Amicus Prime Robot - Long Review
Thursday, August 6, 2020
By Larry Thoman, Butterfly USA's in-house robot guru and former General Manager at Newgy

Butterfly launched a refresh of its highly regarded Amicus line of table tennis robots at the recent World Team Table Tennis Championships in Sweden. The newly introduced models are the Start, Expert, and Prime models. All are upgraded models from the models they're replacing - the Basic, Advance, and Professional.
Get current prices → Amicus Prime • Amicus Expert • Amicus Start
These new robots continue the Amicus signature 3-wheel head design, which can produce any type of spin-topspin, backspin, no spin, left sidespin, right sidespin, and any combination of left/right sidespin with either topspin or backspin. The 3-wheel head design is an advantage over 2-wheel designs as it is unnecessary to rotate the head to achieve sidespin, thus reducing wear and tear on the head.
In a similar way, the head's design includes a small, lightweight Deflector Plate to determine left/right and up/down directions of the ball throws. This Deflector Plate can be quickly moved to effect trajectory changes even when the timing between shots is less than half a second. Other robot designs are based on moving the entire head up/down and left/right, making such direction changes relatively slow by comparison. In addition, moving the added mass and weight of the entire head in quick start and stop movements will introduce more stress on the head over time.
For all 3 models, the common differentiator from the previous models is that the electronics have been upgraded. Instead of the power electronics being housed in a control box at the player's end of the table, they now are housed in the base of the main unit next to the ball feed mechanism. Since the power electronics are now very close to the motors and sensors they control, power is handled in a much more efficient and reliable manner. Previously, power was routed on a 20 foot round trip to the Control Panel and back again, introducing latency and reducing responsiveness.
Beyond the power electronics, the biggest change in these new models occurs in the top of the line Prime model. This is the first table tennis robot that is supplied with an Android tablet to control all the settings. Alternatively, a user can use their own tablet or smartphone, either Android or iOS, by downloading the Amicus app to their device.
Software control offers many advantages over the traditional hardware-based control boxes used on other table tennis robots. Features and the interface can be updated in the future by simply downloading those updates from the internet directly to the device. This is very similar to the way you update the software on your computer.
I found the Prime's tablet to be very touch responsive, and was especially impressed with the tablet's battery life. Controls are primarily affected by use of slider controls and buttons, all of which were easy to understand and use. One feature I liked about the controls was that you could use the sliders to affect large changes, and then tap the plus (+) or minus (-) buttons at each end of the slider to affect finer, single unit adjustments.
The tablet connects via Bluetooth to the robot and the connection was easy to establish. However, when using battery power, if the power saver kicks in, the Bluetooth connection can be lost. But quitting and restarting the app, or powering the robot on/off, caused the connection to be quickly re-established. So for this reason, I'd recommend keeping it plugged into power during use so it's always fully charged and to prevent the loss of the connection. If you want to remove it to charge elsewhere, it is simple to do as it removes easily from its holder.
A simple bracket holds the tablet securely on the side of the table in an unobtrusive manner and the screen has a wide viewing angle that made it readable from any position behind the table. The bracket is cleverly designed so it can be mounted on either the left or right side of the table to keep it handy for either left or right-handed users.
When you turn on the tablet, the Amicus app automatically opens, and establishes the connection with the robot. It then shows the primary screen of the app, the Exercise List. This is a list of all the exercises, or drills, that are stored on the tablet. Exercises can be 1 ball or multiple balls (10 maximum). The Exercise List comes pre-programmed with 20 drills chosen by Richard Prause, former German National Team Coach. Or you can create a new exercise from scratch.
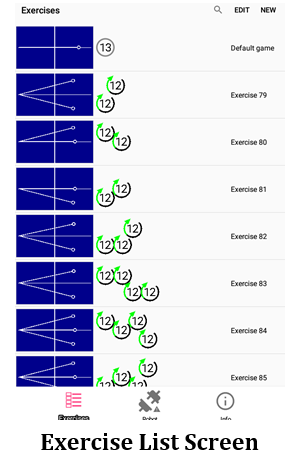
This list gives a top view diagram of each exercise with each ball mapped out on the table. Each ball is shown to the right of the top view diagram in successive order from first ball to last. In the middle of the ball's icon is a number that indicates the speed of that ball. And the periphery of the ball's icon will be colored solid gray to indicate no spin, or with a red counterclockwise arrow to indicate backspin, or with a green clockwise arrow to indicate topspin. And the longer the arrow is, the more topspin or backspin is on the ball.
A quick glance at this diagram will quickly tell you the number of balls in the exercise, their order, the landing spot of each ball, their speed, the type and amount of spin, and whether the exercise starts with a serve (ball bounces first on robot's end) or return (ball bounces first on player's end). This makes it very easy to find and select the exercise you want to start playing. Tapping on an exercise opens the Play Exercise screen.
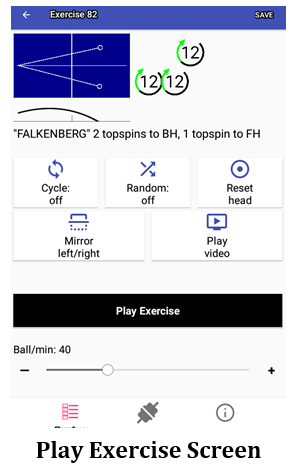
At the top of that screen is both a top view and side view diagram of the table. The top view duplicates the same view seen in the Exercise List. But the side view gives additional information about the trajectory of the ball. And directly below is a written description of the drill, which is a handy place to record notes about the exercise, like what type of shots you want to use, what skills are developed by that exercise, and the purpose of that exercise.
To further illustrate how the exercise is done, a Play Video button is available that shows a top player demonstrating the drill. This video repeatedly loops until you stop it and then returns you to the Play Exercise screen. However, this video button is available only if a video of the drill has been downloaded from Butterfly's website.
Now that you know how to do the exercise, when you're ready to start playing, simply adjust the ball frequency slider to a frequency of your liking, then tap the Play Exercise button at the bottom. After a second or two delay, balls begin to be delivered in the order shown in the top view diagram. The tablet will switch screens to the Stop Exercise Screen with a large red Stop Exercise button.
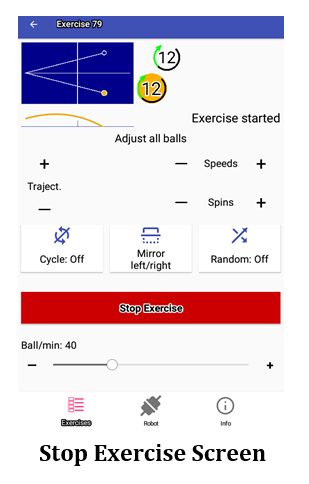
Just before the robot throws a ball, the ball's icon turns a yellow color to indicate it's the current ball. If you're quick enough with your hand and eye, or an assistant is available, you can adjust the speed and spin amount on every ball by using the provided slider controls (works best if all balls are same speed and spin). You can also adjust the frequency up or down from this screen. When ready to stop (it usually doesn't take too long!), tap the big red Stop Exercise button.
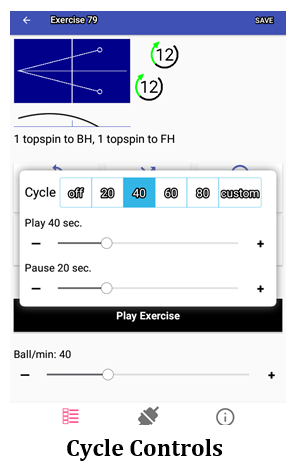
Doing so returns you back to the Play Exercise Screen. There are several additional options available on this screen to add variety to your exercises (which also appear on the Stop Exercises Screen, so they can be adjusted or turned on/off during play as well). The first is Cycle. This button replicates interval training by providing distinct Play and Pause periods for an exercise.
So, for instance, an exercise can be played for 40 seconds, and then paused for 20 seconds. This is similar to the natural rhythm of a live match where there is a pause while the server prepares to serve, then a quick series of strokes while the point is played, and then action is paused until the next serve. This is a popular way to train on a robot in Europe and assists in making the skills learned in robot training more transferable to match play and better conditions you physically to the rigors of playing table tennis competitively.
Another very handy function is the Mirror button. This button is a quick and easy way to adapt an exercise for either left or right-handed players without having to re-write the exercise. Pressing this button reverses the left/right placement of all shots.
This is also a way to get a new exercise variation. For example, if the exercise is 2 backhand shots followed by a forehand shot, pressing the Mirror button would change that exercise to 2 forehands and 1 backhand.
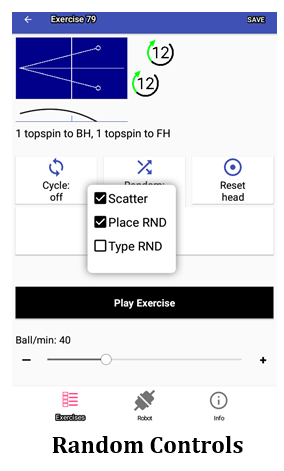
The Random Button provides several ways to randomize shots within a drill. Once an exercise is learned in a rote fashion, adding randomization makes the drill more challenging and adds a new layer to the learning of the skills. Random has 3 options: Scatter, Place, and Type.
Scatter enlarges the landing spot of each ball from about a 5 inch circle to about a 10 inch circle. This better replicates the more imprecise shots of a human player. Place mixes up the placement so the order of shots in an exercise becomes unpredictable. And Type mixes up the speeds, spins, and trajectories of the shots (I found this less useful than Place and Scatter). And you can also turn multiple options on at once, so it's possible, for instance, to have your shots both scattered and have their placements randomized.
Pressing the Stop Exercise Button isn't the only way to start/stop ball delivery. The Prime also comes with a multi-functional remote that looks a lot like a car key fob. With this remote, you can start and stop ball delivery, and decrease/increase the ball frequency. I like this size of remote as it is very small and is barely noticeable in my pocket while I'm playing an exercise. I've used larger wireless remotes and smartphones, but do not like their weight and bulkiness in my pocket while I'm moving around doing footwork exercises.
The remote comes with a clip, but I found it unnecessary and removed it. Using the remote makes it more logical to position the tablet closer to the table net, instead of close to the endline that is the normal position for a wired controller. Positioning the tablet close to the table net keeps the tablet within easy reach for making adjustments to the settings, while at the same time, it keeps it out of the way for shots hit to the backhand corner, or interfering with footwork movements when you're practicing quick step-outs where you move around your backhand corner to use your forehand. Another simple, thoughtful design feature that shows Butterfly's design considers the player's user experience that I've often found lacking in other robots.

The other principal screen that will be used a lot is the Ball Screen. This screen is used to adjust the parameters of each ball in an exercise. This screen is reached by tapping on a ball's icon from the Play Exercise Screen. When clicked, the icon turns yellow and the following screen appears:
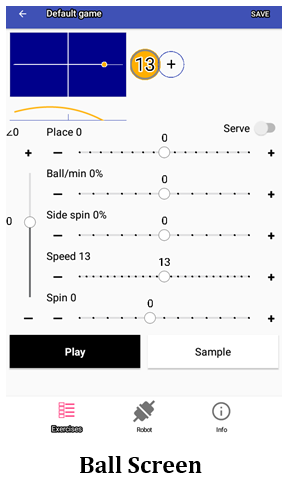
On this screen are the controls to adjust the placement, spin type, spin amount, speed, and trajectory of the ball. You can also adjust the timing of individual shots, so for instance, if an exercise starts with a slow, short backspin serve and then is followed by several fast topspin loops, you'll need to slow the frequency down a bit after the serve, so you'll have enough time to step back out before the rapid fire topspin shots arrive. This is a very important control I've seen missing on many robots.
Another control of note is the Spin control. This lets you select the degree of topspin or backspin. Topspin has 7 degrees of spin from light to extremely heavy. The last two (6 & 7) use wheel reversal to produce the heaviest spins. For backspin, there are 5 degrees of spin with 4 & 5 using wheel reversal to produce heavy spin.
Reversing the opposing wheel(s) increases spin and decreases speed. This allows the Prime to use the full range of the speed/spin spectrum from approximately 10/90 speed/spin to 100/0. If robots don't reverse the opposing wheel(s), then they are limited in their speed/spin spectrum from approximately 50/50 to 100/0. So the Prime can throw shots like slow loops, ghost serves, or heavy floating chops where spin is very heavy but speed is very slow. If a robot does not reverse its wheel(s), then it cannot produce such shots.
You can also designate the first 1, 2, or 3 balls of an exercise as serves with the Serve Switch. When a ball is designated a serve, a 1.5 second delay is added immediately before the serve is thrown, simulating the normal pause before a point begins in a real match. If more than one ball is designated as a serve, then the robot automatically picks one of those balls and starts the exercise with that ball. Balls designated as serves are colored pink to differentiate them from non-serve balls.
At the bottom of the Ball Screen are two buttons. Play opens the Play Exercises Screen and begins playing the entire exercise. Sample is probably more useful in this scenario as it throws only the ball being edited (no other balls in the exercise are thrown). This lets you see if your adjustments to that ball are what you want before going on to adjust other balls in the exercise.
I could go on and on about all the fantastic features available on this robot. As is apparent from the above, this robot is very intelligently designed with all the features needed to customize drills to your heart's content. Controls are well organized, accessible, and easy to understand. Screens flow logically according to what you're doing at the time. And while this robot can do some pretty complicated things, things unavailable on other robots, its interface makes these functions accessible in a very intuitive way.
Kudos to Butterfly for developing the most state-of-the-art table tennis robot available. If you want the most advanced robot you can get, or just want a robot without limits, do yourself a favor and get one of these beauties. You'll be pinching yourself with joy when you see for yourself all the neat things it can do.